David silver’s reinforcement learning lecture 4
Model-Free Prediction
이제부터는 model을 모르는 상황에 대해 최적의 value function을 찾는다.
1. Monte-Carlo Reinforcemnet Learning

MC는 episode들을 직접 경험하면서 학습하는 방법이다.
episode가 끝나면 return의 평균으로 value를 정한다.
단, MC는 episode가 있고 끝나야만 적용 가능하다는 단점이 있다.
-
Monte-Carlo Policy Evaluation

여기서 empirical mean return은 직접 episode를 경험하고 얻은 return들의 평균값을 의미한다.
단, 여기서 모든 state를 방문한다는 가정이 있어야 적용할 수 있는 방법이다.
-
First-Visit Monte-Carlo Policy Evaluation
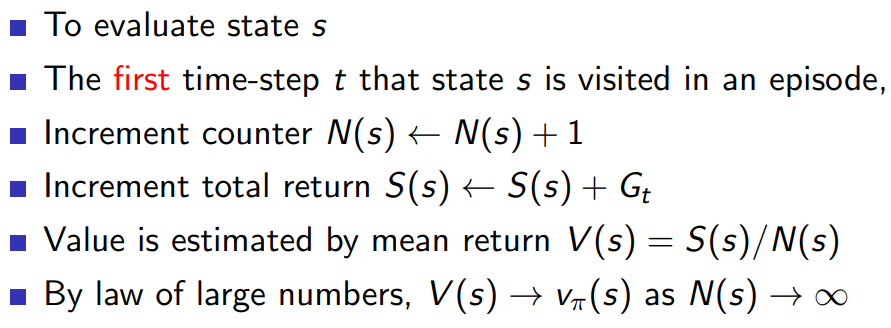
first-visit은 어떤 state에 처음 방문한 경우만 고려하는 방법이다(재방문은 무시).
state의 갯수(방문한 횟수)가 커지면 value가 최적의 상태로 수렴하게 된다.
-
Every-Visit Monte-Carlo Policy Evaluation

every-visit은 state에 재방문한 경우도 포함하는 방법이다.
-
Incremental Monte-Carlo
-
Inremental mean

평균을 구할 때 위와 같이 변형하면 이전 평균에다가 새로운 값이 들어오면 바로 update를 할 수 있게 된다.
그냥 일반적으로 구하는 평균은 값을 전부 다 기억하고 있어야 하는데, large problem의 경우 메모리를 많이 사용.
이 방식으로 하면 이전 값들을 전부 다 기억할 필요없이 새로운 값이 들어올 때 바로바로 업데이트 가능. 즉, 메모리를 아낄 수 있다.
-
Incremental Monte-Carlo Updates

Incremental mean 방식으로 value를 업데이트한다.
non-stationary problem이란, action을 취할 때마다 MDP가 바뀌는 문제를 말한다. 따라서, 이 경우에는 이전의 값들의 중요도가 떨어지니까 alpha로 줄여준다.
-
-
2. Temporal-Difference Learning
TD 또한 MC와 마찬가지로 episode를 경험하여 학습하는 방법이다. 그래서 TD도 model-free에 적용 가능하다.
단, episode가 끝나고 난 뒤에 update하는 MC와는 달리, TD는 episode가 끝나기 전인 불완전한 상태로, 즉, bootstrapping(추정치를 추정치로부터 업데이트)으로 학습한다.

episode가 끝나고 얻은 return(G)으로 value를 업데이트하는 MD와 달리, TD는 바로 다음 state에서의 추정치를 통해 업데이트를 한다.
-
Driving Home Example


이 예시에서 MC는 예측 경과 시간이 집에 도착(terminal state)하고 update 되는 반면에, TD는 다음 state의 value로 update되는 것을 볼 수 있다.
- Characteristics of MC and TD
- MC
- update를 하려면 episode가 끝날 때까지 기다려야 한다.
- 따라서, episodic(terminating) environments 경우에만 적용 가능하다.
- episode가 끝난 뒤 얻는 return으로 업데이트를 하는데, 이는 unbiased 이다.
- Return은 많은 random actions으로부터 얻기 때문에 variance가 크다.
- 초기값에 전혀 민감하지 않다.
- Markov property를 이용하지 않는다.
- TD
- 매 step마다 업데이트 할 수 있다.
- TD는 continuing(non-terminating) environments 에도 적용 가능하다.
- TD target은 biased 이다. (대부분 biased여도 최적으로 수렴한다고 한다.)
- TD target은 한 번의 random action으로 얻기 때문에 variance가 작다.
- 초기값에 민감하다.
- Markov property를 이용한다.
-
Unified view of Reinforcemnet Learning

TD는 sampling을 하고, bootstrapping을 한다.
MC는 smapling을 하고, bootstrapping을 하지 않는다.
DP는 sampling을 하지 않고, bootstrapping을 한다.
- MC
-
n-Step TD

TD target을 바로 다음 state가 아니라 n-step 이후로 설정해도 된다. 여기서, n이 커질수록 TD는 MC에 가까워진다.
-
n-Step Return

n-step 이후에 설정한 return을 수식으로 나타낸 것이다.
-
-
Forward-view TD(λ)

TD(λ)는 1부터 n까지의 모든 return을 결합한 것이다. 이때, geometric mean으로 λ-return을 얻는다.

n쪽으로 갈수록 (1-λ)에 의해서 weight가 줄어든다. (λ는 0과 1사이의 값)

forward-view 방식은 MC와 마찬가지로 episode가 끝나야 계산할 수 있다. 즉, TD의 장점이 사라지게 된다.
-
Backward-view TD(λ)
Update online, every step, from incomplete sequences
-
Eligibility Traces

Eligibility trace는 최근에 발생한 state와 빈번하게 일어난 state 모두를 고려하여 계산한 것이다. state가 발생할 때마다 1을 더해주고 시간이 지날수록 조금씩 감소시키면 frequenct heuristic과 recency heuristic 둘 다를 만족시킬 수 있다.
여기서 gamma는 0과 1사이의 값이다.
-

TD-error와 dligibility trace를 통해 value를 업데이트한다.
-
TD(0)

backward-view 식에서 λ=0을 대입하면 TD(0)랑 똑같아진다.
-
TD(1)

offline update일 경우에는 forward-view와 backward-view가 일치한다고 한다.
λ=1일 경우에는, MC랑 같아진다.
증명은 아래와 같다.


※ 참고문헌 및 자료